
kuleshov.md 11 KB
Гидроакустические преобразователи
Гидроакустический преобразователь является техническим устройством, у которого основное предназначение это – преобразование электрических колебаний в механические, или, наоборот. Также существует два основных класса гидроакустических преобразователей – это магнитострикционные и пьезоэлектрические.
Как работает Гидроакустика?
Принцип работы гидроакустической системы позиционирования заключается в определении положения маяка-ответчика, установленного на подводном объекте, относительно судна-носителя. Для этого судно оборудуется одной или несколькими гидроакустическими антеннами (ГА), передающими и принимающими сигналы от маяков-ответчиков.
Для чего в водной среде используют акустические излучения?
Кроме звукоподводной связи гидроакустика применяется для: Обнаружения шумовых сигналов и определения направления на них; Излучения акустических сигналов, обнаружения отраженных сигналов и определения координат; Классификации обнаруженных сигналов.
Изобретение относится к области гидроакустики, а именно к конструированию гидроакустических преобразователей и антенн, и может найти применение при проведении океанологических исследований, в качестве антенн гидроакустических станций различного назначения, а также - для систем звукоподводной связи. Техническим результатом изобретения является уменьшение массогабаритных параметров при сохранении устройством рабочей полосы пропускания и эффективности излучения, уменьшение стоимости устройства и расширение функциональных возможностей. Гидроакустический преобразователь волноводного типа содержит набор N соосно расположенных идентичных пьезоактивных колец с акустически гибкими прокладками между их торцами, акустический экран, расположенный на внешней поверхности преобразователя, генератор сигналов, линию задержки, обеспечивающую увеличение времени задержки сигнала с ростом номера кольца и соединенную с каждым кольцом через промежуточные усилители с последовательно нарастающим от кольца к кольцу коэффициентом усиления, усилители мощности. При этом выход генератора сигналов соединен со входом фильтра с регулируемым в рабочей полосе частот преобразователя коэффициентом передачи, минимальное значение которого находится в области радиального резонанса пьезоактивного кольца, а выход фильтра соединен с линией задержки.
Что такое гидроакустическая система?
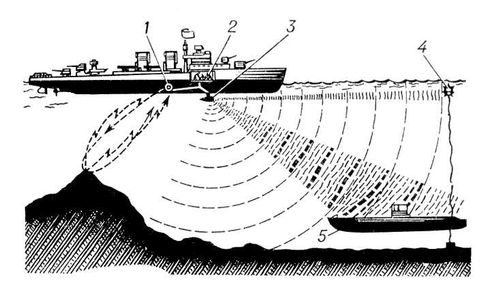
Акустическая система составляется из многих электроакустических преобразователей (гидрофонов — у принимающих голосовой сигнал, вибраторов — у приёмоизлучающих Г. с.) для создания необходимой характеристики направленности приёма и излучения. Преобразователи размещаются (в зависимости от типа и назначения Г. с.) под днищем корабля на поворотно-выдвижном устройстве или в стационарном обтекателе, проницаемом для акустических колебаний, встраиваются в наружную обшивку корабля, монтируются в буксируемом кораблём или опускаемом с вертолёта контейнере, устанавливаются поверх опорной конструкции на дне моря. Компенсатор вносит в переменные токи, протекающие в электрических цепях разнесённых друг от друга гидрофонов, сдвиг фаз, эквивалентный разности времени прихода акустических колебаний к этим гидрофонам. Численные значения этих сдвигов показывают угол между осью характеристики направленности неподвижной акустических системы и направлением на объект. После усиления электрические сигналы подаются на индикаторное устройство (телефон или электроннолучевую трубку) для фиксирования направления на шумящий объект. Генератор активной Г. с. создаёт кратковременные электрические импульсные сигналы, которые затем излучаются вибраторами в виде акустических колебаний. В паузах между ними отражённые от объектов сигналы принимаются теми же вибраторами, которые на это время присоединяются переключателем «приём—передача» к усилителю электрических колебаний. Расстояние до объектов определяется на индикаторном устройстве по времени запаздывания отражённого сигнала относительно прямого (излучаемого).

Где применяются гидроакуситические системы?
Г. с. устанавливают на подводных лодках, военных надводных кораблях, вертолётах, на береговых объектах для решения задач противолодочной обороны, поиска противника, связи подводных лодок друг с другом и с надводными кораблями, выработки данных для пуска ракето-торпед и торпед, безопасности плавания и др. На транспортных, промысловых и исследовательских судах Г. с. применяют для навигационных нужд, поиска скоплений рыбы, проведения океанографических и гидрологических работ, связи с водолазами и др. целей.
Вопросы по теме
Где применяются гидроакуситические системы?
а) На воздушном шаре
б) на карусели
в) В школьном автобусе
г) На подводных лодках, военных надводных кораблях, вертолётах
Как работает Гидроакустика
а) Не знаю
б) По воздуху
в) Принцип работы гидроакустической системы позиционирования заключается в определении положения маяка-ответчика, установленного на подводном объекте, относительно судна-носителя. Для этого судно оборудуется одной или несколькими гидроакустическими антеннами (ГА), передающими и принимающими сигналы от маяков-ответчиков.
г) По проводам
Для чего в водной среде используют акустические излучения?
а) Обнаружения шумовых сигналов и определения направления на них; Излучения акустических сигналов, обнаружения отраженных сигналов и определения координат; Классификации обнаруженных сигналов.
б) Пугать рыб
в) Ловить рыб
г) Не знаю
Список литературы
https://www.booksite.ru/fulltext/1/001/008/010/196.htm https://top-technologies.ru/ru/article/view?id=36660#:~:text=%D0%93%D0%B8%D0%B4%D1%80%D0%BE%D0%B0%D0%BA%D1%83%D1%81%D1%82%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9%20%D0%BF%D1%80%D0%B5%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%20%D1%8F%D0%B2%D0%BB%D1%8F%D0%B5%D1%82%D1%81%D1%8F%20%D1%82%D0%B5%D1%85%D0%BD%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%BC%20%D1%83%D1%81%D1%82%D1%80%D0%BE%D0%B9%D1%81%D1%82%D0%B2%D0%BE%D0%BC,%D0%BF%D1%80%D0%B5%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D0%B5%D0%B9%20%E2%80%93%20%D1%8D%D1%82%D0%BE%20%D0%BC%D0%B0%D0%B3%D0%BD%D0%B8%D1%82%D0%BE%D1%81%D1%82%D1%80%D0%B8%D0%BA%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D1%8B%D0%B5%20%D0%B8%20%D0%BF%D1%8C%D0%B5%D0%B7%D0%BE%D1%8D%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B5. http://ivdon.ru/uploads/article/pdf/IVD_205_Voronin_2.pdf_2389e5b856.pdf https://mpm.spbstu.ru/userfiles/files/14-Britenkov%2C-Rodyshkin.pdf